thb1314
RoiAlign算子的前向传播与反向传播解读
本文写于2024-01-20/21下午
一、前言
忙活了一个多月,终于腾出手来将这篇文章安排进了TODO List,借着一个周末两个慵懒的下午梳理一下RoiAlign的具体实现步骤和原理。
只要是入门了目标检测的朋友就一定知道RoiAlign,只是了解程度不一样,曾经的我看源码都看的头疼,现在总算可以沉下心来深入研究一下。
为什么研究它呢?实际上是我在看Grounding DINO的时候,一直向前追溯相关文献,从DINO、DETR、DCN系列再到RoiAlign,我不禁问自己:RoiAlign前向计算比较好理解,那么RoiAlign的反向传播过程是什么样子呢?
于是,就有了这篇文章。
二、RoiAlign基本原理
2.1 Roi Pooling
说起RoiAlign就不得不提RoiPooling,原始版本FasterRCNN标准配置。在two-stage检测器中,有一个需要从根据候选框坐标提取输入图像特征的操作,这个操作的输入需要满足输入一个目标框和一个特征图,输出一个从特征图上抠出目标框位置的子特征图。
同时,为了便于后续批处理,输出的特征图只有batch维度可以变化,H和W维度不能变化,所以就有了RoiPooling算子的设计。
RoiPooling 就是输入Roi目标区域的坐标框描述,输出目标框对应的Roi feature,且所有输出的feature在C、H、W三个方向上保持一致。
先贴出一张图,通过下面这幅图像解释RoiPooling的工作原理.
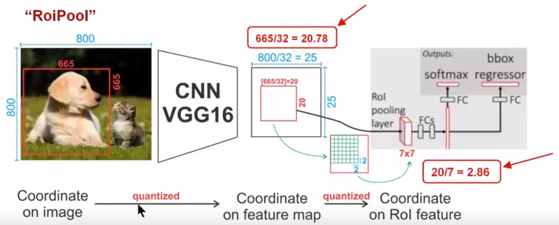
针对上图
- Conv layers使用的是VGG16,feat_stride=32(即表示,经过网络层后图片缩小为原图的1/32),原图800*800,最后一层特征图feature map大小:25*25
- 假定原图中有一region proposal,大小为 $665\times665$ ,这样映射到特征图中的大小:665/32=20.78,即 $20.78\times20.78$ ,如果你看过Caffe的RoiPooling的C++源码,在计算的时候会进行取整操作,于是进行所谓的第一次量化,即映射的特征图大小为20*20。
- 假定
pooled_w=7,pooled_h=7,即pooling后固定成 $7 \times7$ 大小的特征图。将上面在 feature map上映射的 $20 \times 20$ 的region proposal划分成49个同等大小的小区域,每个小区域的大小20/7=2.86,即 $2.86 \times 2.86$ ,所以进行第二次量化,故小区域大小变成 $2 \times 2$ 。 - 每个 $2 \times 2$ 的小区域里,取出其中最大的像素值,作为这个区域的”代表”。这样49个小区域就输出49个像素值,组成 $7 \times 7$ 大小的feature map。
通过上面可以看出,经过两次量化,即将浮点数取整,原本在特征图上映射的 $20\times20$ 大小的region proposal,经过自适应Pooling操作变为 $7 \times 7$ ,这样的像素偏差势必会对后层的回归定位产生影响。
为了避免量化带来的位置表征偏差,于是就有了RoiAlign。
2.2 RoiAlign
为了解决Roi Pooling两次量化问题,Roi Align不再采用取整量化操作,而是保留了浮点数的运算,并使用双线性插值的方式求取像素值。
先说一下什么是双线性插值。
双线性插值是有两个变量的插值函数的线性插值扩展,其核心思想是在两个方向分别进行一次线性插值。
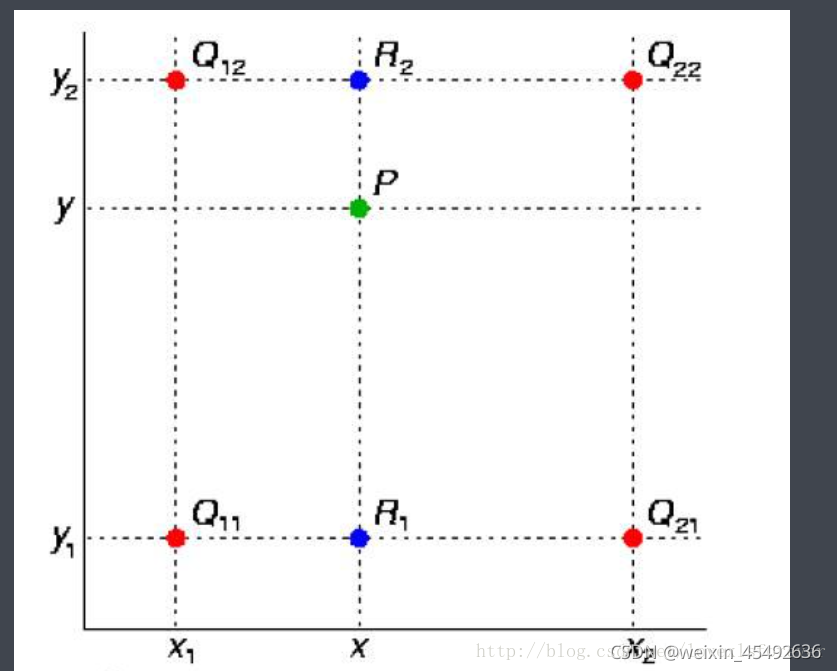
假如我们想得到未知函数 $f(z)$ 在点 $P = (x, y)$ 的值,已知函数 $f(z)$ 在 $Q_{11} = (x_1, y_1)$ 、 $Q_{12}=(x_1, y_2)$ , $Q_{21}=(x_2,y_1)$ 以及 $Q_{22}=(x_2,y_2)$ 四个点的值。最常见的情况, $f(z)$ 就是一个像素点的像素值。首先在 $X$ 方向进行线性插值,得到
\[\begin{align*} & f(R_1) \approx \frac{x_2 - x}{x_2 - x_1} f(Q_{11}) + \frac{x - x_1}{x_2 - x_1} f(Q_{21})\ where\ R_1 = (x, y_1) \\ & f(R_2) \approx \frac{x_2 - x}{x_2 - x_1} f(Q_{12}) + \frac{x - x_1}{x_2 - x_1} f(Q_{22})\ where\ R_2 = (x, y_2) \end{align*}\]然后在y方向进行线性插值,得到
\[f(P) \approx \frac{y_2 - y}{y_2 - y_1} f(R_1) + \frac{y - y_1}{y_2 - y_1} f(R_2)\]综合起来就是双线性插值的结果:
\[\begin{align*} f(x, y) &\approx \frac{(x_2 - x)(y_2 - y)}{(x_2 - x_1)(y_2 - y_1)}f(Q_{11}) \\ &+ \frac{(x - x_1)(y_2 - y)}{(x_2 - x_1)(y_2 - y_1)}f(Q_{21}) \\ &+ \frac{(x_2 - x)(y - y_1)}{(x_2 - x_1)(y_2 - y_1)}f(Q_{12}) \\ &+ \frac{(x - x_1)(y - y_1)}{(x_2 - x_1)(y_2 - y_1)}f(Q_{22}) \end{align*}\]因此双线性插值的计算结果与八个值有关系,四个函数值和四个与之对应的系数值。
回过头我们看一下RoiAlign算子的计算过程,通过这图解释RoiAlign的工作原理

针对上图
Conv layers使用的是VGG16,feat_stride=32(即表示,经过网络层后图片缩小为原图的1/32),原图 $800 \times 800$ ,最后一层特征图feature map大小: $25 \times 25$- 假定原图中有一region proposal,大小为 $665 \times 665$ ,映射到特征图中的大小:665/32=20.78,即 $20.78 \times 20.78$ ,此时,没有像RoiPooling那样就行取整操作,保留浮点数
- 假定
pooled_w=7,pooled_h=7,即pooling后固定成 $7 \times 7$ 大小的特征图,所以将在feature map上映射的 $20.78 \times 20.78$ 的region proposal划分成49个同等大小的小区域,每个小区域的大小20.78/7=2.97,即区域大小为 $2.97 \times 2.97$ - 假定采样点数为4,即表示对于每个 $2.97 \times 2.97$ 的小区域,平分四份,每一份取其中心点位置,而中心点位置的像素,采用双线性插值法进行计算,这样,就会得到四个点的像素值,如下图

上图中,四个红色叉叉‘×’的像素值是通过双线性插值算法计算得到的。
最后,取四个像素值中最大值或者平均值(有参数可以设定该操作)作为这个小区域(即: $2.97 \times 2.97$ 大小的区域)的像素值,如此类推同样是49个小区域得到49个像素值,组成 $7 \times 7$ 大小的feature map。
接下来我们通过解读mmcv中RoiAlign算子的前向和反向传播过程的代码来理解具体操作细节。
三、RoiAlign算子CPU版本解读
mmcv中代码地址:
https://github.com/open-mmlab/mmcv/blob/v2.1.0/mmcv/ops/csrc/pytorch/cpu/roi_align.cpp
首先Line 11-21定义用于存储双线性插值的四个自变量和四个权重系数的结构体PreCalc
// implementation taken from Caffe2
template <typename T>
struct PreCalc {
// 用于记录存放四个点的像素值的索引值
int pos1;
int pos2;
int pos3;
int pos4;
// 对应四个点的权重值
T w1;
T w2;
T w3;
T w4;
};
然后我们先看看调用关系,在Line 384-403行,定义:
void ROIAlignForwardCPULauncher(Tensor input, Tensor rois, Tensor output,
Tensor argmax_y, Tensor argmax_x,
int aligned_height, int aligned_width,
float spatial_scale, int sampling_ratio,
int pool_mode, bool aligned) {
/*
input:输入特征图
rois:输入roi坐标,维度 [N,5] 第一列表示roi坐标的batch index
output:输出tensor。维度[B, C, aligned_height, aligned_width]
argmax_y:输出tensor,维度与output相同,用于记录当为单个网格的值为max pooling操作取值时,每个输出的feature的位置用到的原输入tensor的位置的y坐标
argmax_x:输出tensor,维度与output相同,用于记录记录当为单个网格的值为max pooling操作取值时,每个输出的feature的位置用到的原输入tensor的位置的x坐标
aligned_height:输出FeatureMap的H
aligned_width:输出FeatureMap的W
spatial_scale:当前特征图 / 原图大小 的值
sampling_ratio:划分好 aligned_height x aligned_width 个网格后,单个网格用sampling_ratio个点表示
pool_mode:1 表示 描述单个网格的点是对所有采样点去平均 0 表示取最大
aligned:双线性插值的模式控制参数 表示是否采用坐标对齐模式
*/
int output_size = output.numel();
int channels = input.size(1);
int height = input.size(2);
int width = input.size(3);
AT_DISPATCH_FLOATING_TYPES_AND_HALF(
input.scalar_type(), "ROIAlign_forward", [&] {
ROIAlignForward<scalar_t>(
output_size, input.data_ptr<scalar_t>(), rois.data_ptr<scalar_t>(),
output.data_ptr<scalar_t>(), argmax_y.data_ptr<scalar_t>(),
argmax_x.data_ptr<scalar_t>(), aligned_height, aligned_width,
static_cast<scalar_t>(spatial_scale), sampling_ratio, pool_mode,
aligned, channels, height, width);
});
}
接下来我们看一下ROIAlignForward函数,Line110-214
template <typename T>
void ROIAlignForward(const int nthreads, const T* input, const T* rois,
T* output, T* argmax_y, T* argmax_x,
const int pooled_height, const int pooled_width,
const T spatial_scale, const int sampling_ratio,
const int pool_mode, // 0 - max pool, 1 - avg pool
const bool aligned, const int channels, const int height,
const int width) {
/*
nthreads:表面意思是线程个数,实际上是输出的元素总个数,即N x C x pooled_height x pooled_width
input:输入feature map的内存指针
rois:输入rois的内存指针
output:输出feature map的内存指针
argmax_y:输出tensor,维度与output相同,用于记录当为单个网格的值为max pooling操作取值时,每个输出的feature的位置用到的原输入tensor的位置的y坐标
argmax_x:输出tensor,维度与output相同,用于记录记录当为单个网格的值为max pooling操作取值时,每个输出的feature的位置用到的原输入tensor的位置的x坐标
pooled_height:输出FeatureMap的H
pooled_width:输出FeatureMap的W
spatial_scale:当前输入的input feature map的空间大小 / 原图大小 比如1/16
sampling_ratio:划分好 aligned_height x aligned_width 个网格后,单个网格用sampling_ratio个点表示
pool_mode:1 表示 描述单个网格的点是对所有采样点去平均 0 表示取最大
aligned:双线性插值参数,是角点对齐还是中心对齐,角点对齐设置为0,中心对齐设置为1
channels:输入channels
height:输入feature map的高
width:输入feature map的宽
*/
// 根据输出总元素个数计算roi的个数
int n_rois = nthreads / channels / pooled_width / pooled_height;
// (n, c, ph, pw) is an element in the pooled output
// can be parallelized using omp
// #pragma omp parallel for num_threads(32)
// 遍历每一个roi 计算其对应的feature map
for (int n = 0; n < n_rois; n++) {
// 当前roi 对应输出feature 的内存偏移
int index_n = n * channels * pooled_width * pooled_height;
// 首地址偏移
const T* offset_rois = rois + n * 5;
// 取出roi对应的batch index
int roi_batch_ind = offset_rois[0];
// Do not use rounding; this implementation detail is critical
// 是否是中心对齐 aligned 等于1表示中心对齐
T offset = aligned ? (T)0.5 : (T)0.0;
// roi中存储的是实际坐标,这里转换为在roi上的坐标
T roi_start_w = offset_rois[1] * spatial_scale - offset;
T roi_start_h = offset_rois[2] * spatial_scale - offset;
T roi_end_w = offset_rois[3] * spatial_scale - offset;
T roi_end_h = offset_rois[4] * spatial_scale - offset;
// roi的宽和高
T roi_width = roi_end_w - roi_start_w;
T roi_height = roi_end_h - roi_start_h;
if (aligned) {
AT_ASSERTM(roi_width >= 0 && roi_height >= 0,
"ROIs in ROIAlign cannot have non-negative size!");
} else { // for backward-compatibility only
roi_width = std::max(roi_width, (T)1.);
roi_height = std::max(roi_height, (T)1.);
}
// 将roi_height x roi_width 划分成 pooled_height x pooled_width个网格
// 单个网格的尺寸在输入feature map长度和宽度方向上的大小
T bin_size_h = static_cast<T>(roi_height) / static_cast<T>(pooled_height);
T bin_size_w = static_cast<T>(roi_width) / static_cast<T>(pooled_width);
// We use roi_bin_grid to sample the grid and mimic integral
// 单个网格采用多少个子网格点采集表示
// 如果sampling_ratio > 0 就是 sampling_ratio x sampling_ratio 个点
// 在小于零的情况下 高度方向点的尺度为 ceil(roi_height / pooled_height) 自动计算
// 即 单个网格的尺寸在输入feature map长度和宽度方向上的大小 ceil之后作为长和宽的大小
int roi_bin_grid_h = (sampling_ratio > 0)
? sampling_ratio
: ceilf(roi_height / pooled_height); // e.g., = 2
int roi_bin_grid_w =
(sampling_ratio > 0) ? sampling_ratio : ceilf(roi_width / pooled_width);
// 单个网格点被几个点表示
// When the grid is empty, output zeros == 0/1, instead of NaN.
const T count = std::max(roi_bin_grid_h * roi_bin_grid_w, 1); // e.g. = 4
// 接下来是双线性插值环节
// 调用pre_calc_for_bilinear_interpolate每一个网格需要的点的个数
// 一个网格有roi_bin_grid_h * roi_bin_grid_w个点
// 一共 pooled_width * pooled_height 个网格
// we want to precalculate indices and weights shared by all channels,
// this is the key point of optimization
std::vector<PreCalc<T>> pre_calc(roi_bin_grid_h * roi_bin_grid_w *
pooled_width * pooled_height);
pre_calc_for_bilinear_interpolate(
height, width, pooled_height, pooled_width, roi_bin_grid_h,
roi_bin_grid_w, roi_start_h, roi_start_w, bin_size_h, bin_size_w,
roi_bin_grid_h, roi_bin_grid_w, pre_calc);
// 遍历channel 在空间方向上计算feature map
for (int c = 0; c < channels; c++) {
// 输入feature map B,C,H,W
// index_n 是 当前输出feature 的 batch 维度上的偏移
// index_n = n * channels * pooled_width * pooled_height;
// index_n_c 是 当前输出feature 在 c通道上的偏移
int index_n_c = index_n + c * pooled_width * pooled_height;
// 计算 当前 roi_batch_ind batch位置 c通道 输入feature map指向 的内容地址
// 即 &input[roi_batch_ind][c]的首地址
const T* offset_input =
input + (roi_batch_ind * channels + c) * height * width;
int pre_calc_index = 0;
// 遍历每一个网格,进行填充
for (int ph = 0; ph < pooled_height; ph++) {
for (int pw = 0; pw < pooled_width; pw++) {
// 计算输出feature 对应 网格索引
int index = index_n_c + ph * pooled_width + pw;
// 定义输出值、最大值、最大值索引
T output_val = 0.;
T maxval = -10000;
T maxidx_y = -1.f, maxidx_x = -1.f;
// 遍历用于计算当前网格点的所有点
for (int iy = 0; iy < roi_bin_grid_h; iy++) {
// 计算 点集中的y坐标
// roi_start_h 是 roi 起始坐标
// ph * bin_size_h 是 当前网格y方向偏移
// (iy + .5f) * bin_size_h / static_cast<T>(roi_bin_grid_h)
// 是 在 bin中的y方向偏移
// 即 将一个 bin_size_h 分成了 roi_bin_grid_h 份
const T y = roi_start_h + ph * bin_size_h +
static_cast<T>(iy + .5f) * bin_size_h /
static_cast<T>(roi_bin_grid_h);
for (int ix = 0; ix < roi_bin_grid_w; ix++) {
const T x = roi_start_w + pw * bin_size_w +
static_cast<T>(ix + .5f) * bin_size_w /
static_cast<T>(roi_bin_grid_w);
// 根据预先计算的值进行加权
PreCalc<T> pc = pre_calc[pre_calc_index];
T val = pc.w1 * offset_input[pc.pos1] +
pc.w2 * offset_input[pc.pos2] +
pc.w3 * offset_input[pc.pos3] +
pc.w4 * offset_input[pc.pos4];
// 求取最大值 并记录坐标
if (val > maxval) {
maxval = val;
maxidx_y = y;
maxidx_x = x;
}
// 求和
output_val += val;
// 移动索引
pre_calc_index += 1;
}
}
// 在每个网格中 如果pool_mode为0 则执行对采样点集合执行max pooling
// 如果 pool_mode 为1 就取平均
if (pool_mode == 0) {
// We do max pooling inside a bin
output[index] = maxval;
argmax_y[index] = maxidx_y;
argmax_x[index] = maxidx_x;
} else if (pool_mode == 1) {
// We do average (integral) pooling inside a bin
output[index] = output_val / count;
} // if
} // for pw
} // for ph
} // for c
} // for n
}
下面我们看一下每一个网格需要的点是怎么生成的,功能实现在pre_calc_for_bilinear_interpolate函数Line 23-108
template <typename T>
void pre_calc_for_bilinear_interpolate(
const int height, const int width, const int pooled_height,
const int pooled_width, const int iy_upper, const int ix_upper,
T roi_start_h, T roi_start_w, T bin_size_h, T bin_size_w,
int roi_bin_grid_h, int roi_bin_grid_w, std::vector<PreCalc<T>>& pre_calc)
/*
height:输入feature map的height
width:输入feature map的width
pooled_height:输出feature map的pooled_height
pooled_width:输出feature map的pooled_width
iy_upper:一个网格划分成iy_upper * ix_upper个点表示
ix_upper:一个网格划分成iy_upper * ix_upper个点表示
roi_start_h:roi y方向起始坐标
roi_start_w:roi x方向起始坐标
bin_size_h:单个网格的高度
bin_size_w:单个网格的宽度
roi_bin_grid_h:一个网格划分成roi_bin_grid_h * roi_bin_grid_w个点表示
roi_bin_grid_w:一个网格划分成roi_bin_grid_h * roi_bin_grid_w个点表示
pre_calc:输出点的vector
*/
{
int pre_calc_index = 0;
// 遍历用于计算当前网格点的所有点
for (int ph = 0; ph < pooled_height; ph++) {
for (int pw = 0; pw < pooled_width; pw++) {
for (int iy = 0; iy < iy_upper; iy++) {
// 计算 点集 中的y坐标
// roi_start_h 是 roi 起始坐标
// ph * bin_size_h 是 当前网格y方向偏移
// (iy + .5f) * bin_size_h / static_cast<T>(roi_bin_grid_h)
// 是 在 bin中的y方向偏移
// 即 将一个 bin_size_h 分成了 roi_bin_grid_h 份
const T yy = roi_start_h + ph * bin_size_h +
static_cast<T>(iy + .5f) * bin_size_h /
static_cast<T>(roi_bin_grid_h); // e.g., 0.5, 1.5
for (int ix = 0; ix < ix_upper; ix++) {
// 同理求 点集 中的点的x坐标
const T xx = roi_start_w + pw * bin_size_w +
static_cast<T>(ix + .5f) * bin_size_w /
static_cast<T>(roi_bin_grid_w);
T x = xx;
T y = yy;
// 如果坐标不合法就直接返回
// deal with: inverse elements are out of feature map boundary
if (y < -1.0 || y > height || x < -1.0 || x > width) {
// empty
PreCalc<T> pc;
pc.pos1 = 0;
pc.pos2 = 0;
pc.pos3 = 0;
pc.pos4 = 0;
pc.w1 = 0;
pc.w2 = 0;
pc.w3 = 0;
pc.w4 = 0;
pre_calc[pre_calc_index] = pc;
pre_calc_index += 1;
continue;
}
if (y <= 0) {
y = 0;
}
if (x <= 0) {
x = 0;
}
// 双线性插值部分
// 计算离x,y最近的四个点的坐标
int y_low = (int)y;
int x_low = (int)x;
int y_high;
int x_high;
if (y_low >= height - 1) {
y_high = y_low = height - 1;
y = (T)y_low;
} else {
y_high = y_low + 1;
}
if (x_low >= width - 1) {
x_high = x_low = width - 1;
x = (T)x_low;
} else {
x_high = x_low + 1;
}
// 计算系数
T ly = y - y_low;
T lx = x - x_low;
T hy = 1. - ly, hx = 1. - lx;
T w1 = hy * hx, w2 = hy * lx, w3 = ly * hx, w4 = ly * lx;
// 看公式 分母都是1
// 因为x_2 - x_1 = 1
// y_2 - y_1 = 1
// 反映到代码
// 即 y_high - y_low = 1
// x_high - x_low = 1
// 计算四个权重值对应的系数对应的索引值
// save weights and indices
PreCalc<T> pc;
pc.pos1 = y_low * width + x_low;
pc.pos2 = y_low * width + x_high;
pc.pos3 = y_high * width + x_low;
pc.pos4 = y_high * width + x_high;
// 存储 插值 系数
pc.w1 = w1;
pc.w2 = w2;
pc.w3 = w3;
pc.w4 = w4;
pre_calc[pre_calc_index] = pc;
pre_calc_index += 1;
}
}
}
}
}
下面我们看一下反向传播是如何执行的。
整体流程发起函数在ROIAlignBackwardCPULauncher当中
void ROIAlignBackwardCPULauncher(Tensor grad_output, Tensor rois,
Tensor argmax_y, Tensor argmax_x,
Tensor grad_input, int aligned_height,
int aligned_width, float spatial_scale,
int sampling_ratio, int pool_mode,
bool aligned)
/*
grad_output:对roi feature map的梯度累计信息 维度为 [N, C, H, W] H和W为 pooled_height 和 pooled_width
rois:roi输入数据
argmax_y:输出tensor,维度与output相同,用于记录当为单个网格的值为max pooling操作取值时,每个输出的feature的位置用到的原输入tensor的位置的y坐标
argmax_x:输出tensor,维度与output相同,用于记录记录当为单个网格的值为max pooling操作取值时,每个输出的feature的位置用到的原输入tensor的位置的x坐标
grad_input:对输入给Roi Align的feature map的梯度信息,初始化为全0
aligned_height:pooled_height
aligned_width:pooled_width
spatial_scale:当前输入的input feature map的空间大小 / 原图大小 比如1/16
sampling_ratio:划分好 aligned_height x aligned_width 个网格后,单个网格用sampling_ratio个点表示
pool_mode:1 表示 描述单个网格的点是对所有采样点去平均 0 表示取最大
aligned:双线性插值参数,是角点对齐还是中心对齐,角点对齐设置为0,中心对齐设置为1
*/
{
int output_size = grad_output.numel();
int channels = grad_input.size(1);
int height = grad_input.size(2);
int width = grad_input.size(3);
// get stride values to ensure indexing into gradients is correct.
int n_stride = grad_output.stride(0);
int c_stride = grad_output.stride(1);
int h_stride = grad_output.stride(2);
int w_stride = grad_output.stride(3);
AT_DISPATCH_FLOATING_TYPES_AND_HALF(
grad_output.scalar_type(), "ROIAlign_backward", [&] {
ROIAlignBackward<scalar_t>(
output_size, grad_output.data_ptr<scalar_t>(),
rois.data_ptr<scalar_t>(), argmax_y.data_ptr<scalar_t>(),
argmax_x.data_ptr<scalar_t>(), grad_input.data_ptr<scalar_t>(),
aligned_height, aligned_width, static_cast<scalar_t>(spatial_scale),
sampling_ratio, pool_mode, aligned, channels, height, width,
n_stride, c_stride, h_stride, w_stride);
});
}
接下来看ROIAlignBackward函数,在Line 270-382
template <typename T>
void ROIAlignBackward(const int nthreads, const T* grad_output, const T* rois,
const T* argmax_y, const T* argmax_x, T* grad_input,
const int pooled_height, const int pooled_width,
const T spatial_scale, const int sampling_ratio,
const int pool_mode, // 0 - max pool, 1 - avg pool
const bool aligned, const int channels, const int height,
const int width, const int n_stride, const int c_stride,
const int h_stride, const int w_stride)
/*
nthreads:表面意思是线程个数,实际上是roi align算子输出feature map输出的元素总个数,即N x C x pooled_height x pooled_width
grad_output:对roi feature map的梯度累计信息 维度为 [N, C, H, W] H和W为 pooled_height 和 pooled_width
rois:输入rois的内存指针
argmax_y:输入tensor,维度与output相同,用于记录当为单个网格的值为max pooling操作取值时,每个输出的feature的位置用到的原输入tensor的位置的y坐标
argmax_x:输入tensor,维度与output相同,用于记录记录当为单个网格的值为max pooling操作取值时,每个输出的feature的位置用到的原输入tensor的位置的x坐标
grad_input:输出指针,对输入给Roi Align的feature map的梯度信息,初始化为全0
pooled_height:RoiAlign输出FeatureMap的H
pooled_width:RoiAlign输出FeatureMap的W
spatial_scale:当前输入的input feature map的空间大小 / 原图大小 比如1/16
sampling_ratio:划分好 aligned_height x aligned_width 个网格后,单个网格用sampling_ratio个点表示
pool_mode:1 表示 描述单个网格的点是对所有采样点去平均 0 表示取最大
aligned:双线性插值参数,是角点对齐还是中心对齐,角点对齐设置为0,中心对齐设置为1
channels:输入channels
height:输入feature map的高
width:输入feature map的宽
n_stride:记录grad_output指针 batch方向的stride,兼容内存不连续的情况
c_stride:记录grad_output指针 channel方向的stride,兼容内存不连续的情况
h_stride:记录grad_output指针 height方向的stride,兼容内存不连续的情况
w_stride:记录grad_output指针 width方向的stride,兼容内存不连续的情况
*/
{
// 遍历输出所有输入元素。计算其对输入相关联输入元素的梯度
for (int index = 0; index < nthreads; index++) {
// (n, c, ph, pw) is an element in the pooled output
// 计算出pooled_width维度上的索引
int pw = index % pooled_width;
// 计算出pooled_height维度上的索引
int ph = (index / pooled_width) % pooled_height;
// 计算出channel维度上的索引
int c = (index / pooled_width / pooled_height) % channels;
// 计算出roi batch维度上的索引
int n = index / pooled_width / pooled_height / channels;
// 取输入roi的坐标值
const T* offset_rois = rois + n * 5;
// 取出当前roi对应的 batch index
int roi_batch_ind = offset_rois[0];
// 与前向传播计算相同,计算出roi坐标映射到feature map后的坐标
// Do not use rounding; this implementation detail is critical
T offset = aligned ? (T)0.5 : (T)0.0;
T roi_start_w = offset_rois[1] * spatial_scale - offset;
T roi_start_h = offset_rois[2] * spatial_scale - offset;
T roi_end_w = offset_rois[3] * spatial_scale - offset;
T roi_end_h = offset_rois[4] * spatial_scale - offset;
T roi_width = roi_end_w - roi_start_w;
T roi_height = roi_end_h - roi_start_h;
if (aligned) {
AT_ASSERTM(roi_width >= 0 && roi_height >= 0,
"ROIs in ROIAlign do not have non-negative size!");
} else { // for backward-compatibility only
roi_width = std::max(roi_width, (T)1.);
roi_height = std::max(roi_height, (T)1.);
}
// 单个网格大小
T bin_size_h = static_cast<T>(roi_height) / static_cast<T>(pooled_height);
T bin_size_w = static_cast<T>(roi_width) / static_cast<T>(pooled_width);
// 针对输入 feature map 的偏移首地址,等价于 grad_input[roi_batch_ind][c]
T* offset_grad_input =
grad_input + ((roi_batch_ind * channels + c) * height * width);
// 计算输出 feature map 的偏移首地址
int output_offset = n * n_stride + c * c_stride;
// 等价于 &grad_output[n][c]
const T* offset_grad_output = grad_output + output_offset;
// 取出当前对roi feature map的梯度值,等价于 grad_output[n][c][ph][pw]
const T grad_output_this_bin =
offset_grad_output[ph * h_stride + pw * w_stride];
// 如果是max pooling模式 那么梯度仅仅回传到 argmax 对应的坐标的点
// 其余位置为梯度为0,所以grad_input元素调用前要前部初始化为0
if (pool_mode == 0) {
// We do max pooling inside a bin
// 取出最大值是哪个点
T y = argmax_y[index], x = argmax_x[index];
if (y != -1.f) {
T w1, w2, w3, w4;
int x_low, x_high, y_low, y_high;
// 计算针对(x,y)坐标处 四个坐标点坐标和对应的权值
// 权值就是对应坐标点的梯度
bilinear_interpolate_gradient(height, width, y, x, w1, w2, w3, w4,
x_low, x_high, y_low, y_high, index);
// 通过链式法则,计算出对四个点的梯度
T g1 = grad_output_this_bin * w1;
T g2 = grad_output_this_bin * w2;
T g3 = grad_output_this_bin * w3;
T g4 = grad_output_this_bin * w4;
if (x_low >= 0 && x_high >= 0 && y_low >= 0 && y_high >= 0) {
// 按照多元函数微分学,将此处梯度进行累加操作
// 因为同一处位置可能有多个roi做前向计算
// atomic add is not needed for now since it is single threaded
add(offset_grad_input + y_low * width + x_low, static_cast<T>(g1));
add(offset_grad_input + y_low * width + x_high, static_cast<T>(g2));
add(offset_grad_input + y_high * width + x_low, static_cast<T>(g3));
add(offset_grad_input + y_high * width + x_high, static_cast<T>(g4));
} // if
} // mode
} else if (pool_mode == 1) {
// avg pooling 模式计算梯度 就需要计算出所有的相关点
// y = x / n, dy/dx = 1/n
// We do average (integral) pooling inside a bin
// We use roi_bin_grid to sample the grid and mimic integral
// 计算一个网格点用了多少个采样点
int roi_bin_grid_h =
(sampling_ratio > 0)
? sampling_ratio
: ceilf(roi_height / pooled_height); // e.g., = 2
int roi_bin_grid_w = (sampling_ratio > 0)
? sampling_ratio
: ceilf(roi_width / pooled_width);
const T count = roi_bin_grid_h * roi_bin_grid_w; // e.g. = 4
// 两重循环重新计算采样点坐标
for (int iy = 0; iy < roi_bin_grid_h; iy++) {
const T y = roi_start_h + ph * bin_size_h +
static_cast<T>(iy + .5f) * bin_size_h /
static_cast<T>(roi_bin_grid_h); // e.g., 0.5, 1.5
for (int ix = 0; ix < roi_bin_grid_w; ix++) {
const T x = roi_start_w + pw * bin_size_w +
static_cast<T>(ix + .5f) * bin_size_w /
static_cast<T>(roi_bin_grid_w);
T w1, w2, w3, w4;
int x_low, x_high, y_low, y_high;
// 计算当前采样点下的对应的四个点坐标和对应权值
bilinear_interpolate_gradient(height, width, y, x, w1, w2, w3, w4,
x_low, x_high, y_low, y_high, index);
// 计算梯度并回传
T g1 = grad_output_this_bin * w1 / count;
T g2 = grad_output_this_bin * w2 / count;
T g3 = grad_output_this_bin * w3 / count;
T g4 = grad_output_this_bin * w4 / count;
if (x_low >= 0 && x_high >= 0 && y_low >= 0 && y_high >= 0) {
// atomic add is not needed for now since it is single threaded
add(offset_grad_input + y_low * width + x_low, static_cast<T>(g1));
add(offset_grad_input + y_low * width + x_high, static_cast<T>(g2));
add(offset_grad_input + y_high * width + x_low, static_cast<T>(g3));
add(offset_grad_input + y_high * width + x_high,
static_cast<T>(g4));
} // if
} // ix
} // iy
} // mode
} // for
} // ROIAlignBackward
接下来我们再看下bilinear_interpolate_gradient函数,Line 216-263
template <typename T>
void bilinear_interpolate_gradient(const int height, const int width, T y, T x,
T& w1, T& w2, T& w3, T& w4, int& x_low,
int& x_high, int& y_low, int& y_high,
const int index /* index for debug only*/)
/*
height:输入feature map的高度
width:输入feature map的宽度
y:采样点的y坐标
x:采样点的x坐标
w1/w2/w3/w4:(x,y)附近四个点对应的权重值
x_low/x_high/y_low/y_high:四个点对应的坐标值
index:for debug
*/
{
// 处理不合法的case
// deal with cases that inverse elements are out of feature map boundary
if (y < -1.0 || y > height || x < -1.0 || x > width) {
// empty
w1 = w2 = w3 = w4 = 0.;
x_low = x_high = y_low = y_high = -1;
return;
}
if (y <= 0) y = 0;
if (x <= 0) x = 0;
// 计算四个点坐标
y_low = (int)y;
x_low = (int)x;
if (y_low >= height - 1) {
y_high = y_low = height - 1;
y = (T)y_low;
} else {
y_high = y_low + 1;
}
if (x_low >= width - 1) {
x_high = x_low = width - 1;
x = (T)x_low;
} else {
x_high = x_low + 1;
}
// 计算四个点的对应的权重
T ly = y - y_low;
T lx = x - x_low;
T hy = 1. - ly, hx = 1. - lx;
// reference in forward
// T v1 = input[y_low * width + x_low];
// T v2 = input[y_low * width + x_high];
// T v3 = input[y_high * width + x_low];
// T v4 = input[y_high * width + x_high];
// T val = (w1 * v1 + w2 * v2 + w3 * v3 + w4 * v4);
w1 = hy * hx, w2 = hy * lx, w3 = ly * hx, w4 = ly * lx;
return;
}
OK,呼~,长舒一口气,CPU版本解读完毕。
接下来我们看下gpu版本
四、RoiAlign算子GPU版本解读
老规矩,先看前向传播过程
在 https://github.com/open-mmlab/mmcv/blob/v2.1.0/mmcv/ops/csrc/pytorch/cuda/roi_align_cuda.cu
ROIAlignForwardCUDAKernelLauncher函数,Line 5-30,这里各个参数我就不解释了,在cpu版本解释了。
void ROIAlignForwardCUDAKernelLauncher(Tensor input, Tensor rois, Tensor output,
Tensor argmax_y, Tensor argmax_x,
int aligned_height, int aligned_width,
float spatial_scale, int sampling_ratio,
int pool_mode, bool aligned) {
int output_size = output.numel();
int channels = input.size(1);
int height = input.size(2);
int width = input.size(3);
at::cuda::CUDAGuard device_guard(input.device());
cudaStream_t stream = at::cuda::getCurrentCUDAStream();
AT_DISPATCH_FLOATING_TYPES_AND_HALF(
input.scalar_type(), "roi_align_forward_cuda_kernel", [&] {
roi_align_forward_cuda_kernel<scalar_t>
<<<GET_BLOCKS(output_size), THREADS_PER_BLOCK, 0, stream>>>(
output_size, input.data_ptr<scalar_t>(),
rois.data_ptr<scalar_t>(), output.data_ptr<scalar_t>(),
argmax_y.data_ptr<scalar_t>(), argmax_x.data_ptr<scalar_t>(),
aligned_height, aligned_width,
static_cast<scalar_t>(spatial_scale), sampling_ratio, pool_mode,
aligned, channels, height, width);
});
AT_CUDA_CHECK(cudaGetLastError());
}
我们重点看下cuda核函数调用
参考 https://github.com/open-mmlab/mmcv/blob/v2.1.0/mmcv/ops/csrc/common/cuda/common_cuda_helper.hpp
// 在common.cuh 定义了
// #define THREADS_PER_BLOCK 512
// 第一个参数为 grid 的维度和大小 (grid_size) 单个grid共有 GET_BLOCKS(output_size) 个 block
// 第二个参数为 每个线程块的维度和大小 (block_size) 设置共有 THREADS_PER_BLOCK 个 thread
// 第三个参数为 每个线程块需动态分配的共享内存的字节数,设置为0
// 第四个参数为 指定的相关联的 CUDA 流 设置为输入tensor绑定的stream
roi_align_forward_cuda_kernel<scalar_t>
<<<GET_BLOCKS(output_size), THREADS_PER_BLOCK, 0, stream>>>
// GET_BLOCKS定义:等价于 min(4096, ceil(N / num_threads))
inline int GET_BLOCKS(const int N, const int num_threads = THREADS_PER_BLOCK) {
int optimal_block_num = (N + num_threads - 1) / num_threads;
int max_block_num = 4096;
return min(optimal_block_num, max_block_num);
}
所以一共启动了ceil(output_size / THREADS_PER_BLOCK) * THREADS_PER_BLOCK个cuda thread。
接下来我们看下roi_align_forward_cuda_kernel函数,在
https://github.com/open-mmlab/mmcv/blob/v2.1.0/mmcv/ops/csrc/common/cuda/roi_align_cuda_kernel.cuh
Line 17-108
/*** Forward ***/
template <typename T>
__global__ void roi_align_forward_cuda_kernel(
const int nthreads, const T* input, const T* rois, T* output, T* argmax_y,
T* argmax_x, const int pooled_height, const int pooled_width,
const T spatial_scale, const int sampling_ratio,
const int pool_mode, // 0 - max pool, 1 - avg pool
const bool aligned, const int channels, const int height, const int width)
/*
nthreads:线程个数,实际上是输出的元素总个数,即N x C x pooled_height x pooled_width
input:输入feature map的内存指针
rois:输入rois的内存指针
output:输出feature map的内存指针
argmax_y:输出tensor,维度与output相同,用于记录当为单个网格的值为max pooling操作取值时,每个输出的feature的位置用到的原输入tensor的位置的y坐标
argmax_x:输出tensor,维度与output相同,用于记录记录当为单个网格的值为max pooling操作取值时,每个输出的feature的位置用到的原输入tensor的位置的x坐标
pooled_height:输出FeatureMap的H
pooled_width:输出FeatureMap的W
spatial_scale:当前输入的input feature map的空间大小 / 原图大小 比如1/16
sampling_ratio:划分好 aligned_height x aligned_width 个网格后,单个网格用sampling_ratio个点表示
pool_mode:1 表示 描述单个网格的点是对所有采样点去平均 0 表示取最大
aligned:双线性插值参数,是角点对齐还是中心对齐,角点对齐设置为0,中心对齐设置为1
channels:输入channels
height:输入feature map的高
width:输入feature map的宽
*/
{
/*
在common.cuh中有定义
#define CUDA_1D_KERNEL_LOOP(i, n) \
for (int i = blockIdx.x * blockDim.x + threadIdx.x; i < (n); \
i += blockDim.x * gridDim.x)
上述循环表示
i 初始化为 blockIdx.x * blockDim.x + threadIdx.x
步长为 blockDim.x * gridDim.x
回顾调用过程 blockDim.x 即为 单个block线程的总个数
blockIdx.x 即为grid维度上block的索引
一共启动了 blockDim.x * gridDim.x 个核函数
步长为 blockDim.x * gridDim.x 是为了满足,当nthreads > blockDim.x * gridDim.x 时,依然可以处理剩余元素
*/
// 需要注意的是,cuda核函数的计算逻辑与cpu版本逻辑不太一样,cpu是遍历roi
// cuda核是遍历输出feature map的每一个元素,找到对应的计算
CUDA_1D_KERNEL_LOOP(index, nthreads) {
// 计算输出层的的索引,输入[N,5] 输出 [N, C, H, W]
// (n, c, ph, pw) is an element in the pooled output
int pw = index % pooled_width;
int ph = (index / pooled_width) % pooled_height;
int c = (index / pooled_width / pooled_height) % channels;
int n = index / pooled_width / pooled_height / channels;
const T* offset_rois = rois + n * 5;
// 拿到当前输出feature map的值对应的roi中记录的batch index
int roi_batch_ind = offset_rois[0];
// 将roi中的大图坐标 转换为 feature map上的坐标
// Do not using rounding; this implementation detail is critical
T offset = aligned ? (T)0.5 : (T)0.0;
T roi_start_w = offset_rois[1] * spatial_scale - offset;
T roi_start_h = offset_rois[2] * spatial_scale - offset;
T roi_end_w = offset_rois[3] * spatial_scale - offset;
T roi_end_h = offset_rois[4] * spatial_scale - offset;
T roi_width = roi_end_w - roi_start_w;
T roi_height = roi_end_h - roi_start_h;
if (!aligned) { // for backward-compatibility only
roi_width = max(roi_width, (T)1.);
roi_height = max(roi_height, (T)1.);
}
// 划分网格,并计算单个网格点占feature map上的点数
T bin_size_h = static_cast<T>(roi_height) / static_cast<T>(pooled_height);
T bin_size_w = static_cast<T>(roi_width) / static_cast<T>(pooled_width);
// 计算输入feature map偏移指针 类似于 &input[roi_batch_ind][c]
const T* offset_input =
input + (roi_batch_ind * channels + c) * height * width;
// 定义单个网格采样点个数
// We use roi_bin_grid to sample the grid and mimic integral
int roi_bin_grid_h =
(sampling_ratio > 0)
? sampling_ratio
: static_cast<int>(ceilf(roi_height / pooled_height));
int roi_bin_grid_w =
(sampling_ratio > 0)
? sampling_ratio
: static_cast<int>(ceilf(roi_width / pooled_width));
// max pooling模式
if (pool_mode == 0) {
// We do max pooling inside a bin
T maxval = -FLT_MAX;
T maxidx_y = -1.f, maxidx_x = -1.f;
// 两重循环计算采样点的坐标,根据单个网格点的范围继续划分小网格
// 然后去小网格的中心点作为采样点
for (int iy = 0; iy < roi_bin_grid_h; iy++) {
const T y = roi_start_h + ph * bin_size_h +
static_cast<T>(iy + .5f) * bin_size_h /
static_cast<T>(roi_bin_grid_h);
for (int ix = 0; ix < roi_bin_grid_w; ix++) {
const T x = roi_start_w + pw * bin_size_w +
static_cast<T>(ix + .5f) * bin_size_w /
static_cast<T>(roi_bin_grid_w);
// 采样双线性插值计算采样点,并保存最大值
T val =
bilinear_interpolate(offset_input, height, width, y, x, index);
if (val > maxval) {
maxval = val;
maxidx_y = y;
maxidx_x = x;
}
}
}
output[index] = maxval;
argmax_y[index] = maxidx_y;
argmax_x[index] = maxidx_x;
} else if (pool_mode == 1) {
// 同理 pool_mode == 1 表示 avg pooling 对所有采样点求和后取平均
// We do average pooling inside a bin
const T count = max(roi_bin_grid_h * roi_bin_grid_w, 1);
T output_val = 0.;
for (int iy = 0; iy < roi_bin_grid_h; iy++) {
const T y = roi_start_h + ph * bin_size_h +
static_cast<T>(iy + .5f) * bin_size_h /
static_cast<T>(roi_bin_grid_h);
for (int ix = 0; ix < roi_bin_grid_w; ix++) {
const T x = roi_start_w + pw * bin_size_w +
static_cast<T>(ix + .5f) * bin_size_w /
static_cast<T>(roi_bin_grid_w);
T val =
bilinear_interpolate(offset_input, height, width, y, x, index);
output_val += val;
}
}
output[index] = output_val / count;
}
}
}
下面我们看一下反向传播,调用ROIAlignBackwardCUDAKernelLauncher,在roi_align_cuda.cu Line 32-58
void ROIAlignBackwardCUDAKernelLauncher(Tensor grad_output, Tensor rois,
Tensor argmax_y, Tensor argmax_x,
Tensor grad_input, int aligned_height,
int aligned_width, float spatial_scale,
int sampling_ratio, int pool_mode,
bool aligned) {
int output_size = grad_output.numel();
int channels = grad_input.size(1);
int height = grad_input.size(2);
int width = grad_input.size(3);
at::cuda::CUDAGuard device_guard(grad_output.device());
cudaStream_t stream = at::cuda::getCurrentCUDAStream();
AT_DISPATCH_FLOATING_TYPES_AND_HALF(
grad_output.scalar_type(), "roi_align_backward_cuda_kernel", [&] {
roi_align_backward_cuda_kernel<scalar_t>
<<<GET_BLOCKS(output_size), THREADS_PER_BLOCK, 0, stream>>>(
output_size, grad_output.data_ptr<scalar_t>(),
rois.data_ptr<scalar_t>(), argmax_y.data_ptr<scalar_t>(),
argmax_x.data_ptr<scalar_t>(), grad_input.data_ptr<scalar_t>(),
aligned_height, aligned_width,
static_cast<scalar_t>(spatial_scale), sampling_ratio, pool_mode,
aligned, channels, height, width);
});
AT_CUDA_CHECK(cudaGetLastError());
}
调用roi_align_backward_cuda_kernel一共启动了 ceil(output_size / THREADS_PER_BLOCK) * THREADS_PER_BLOCK个cuda线程
roi_align_backward_cuda_kernel在roi_align_cuda_kernel.cuh Line110 - 210定义
/*** Backward ***/
template <typename T>
__global__ void roi_align_backward_cuda_kernel(
const int nthreads, const T* grad_output, const T* rois, const T* argmax_y,
const T* argmax_x, T* grad_input, const int pooled_height,
const int pooled_width, const T spatial_scale, const int sampling_ratio,
const int pool_mode, // 0 - max pool, 1 - avg pool
const bool aligned, const int channels, const int height, const int width) {
/*
nthreads:表面意思是线程个数,实际上是roi align算子输出feature map输出的元素总个数,即N x C x pooled_height x pooled_width
grad_output:对roi feature map的梯度累计信息 维度为 [N, C, H, W] H和W为 pooled_height 和 pooled_width
rois:输入rois的内存指针
argmax_y:输入tensor,维度与output相同,用于记录当为单个网格的值为max pooling操作取值时,每个输出的feature的位置用到的原输入tensor的位置的y坐标
argmax_x:输入tensor,维度与output相同,用于记录记录当为单个网格的值为max pooling操作取值时,每个输出的feature的位置用到的原输入tensor的位置的x坐标
grad_input:输出指针,对输入给Roi Align的feature map的梯度信息,初始化为全0
pooled_height:RoiAlign输出FeatureMap的H
pooled_width:RoiAlign输出FeatureMap的W
spatial_scale:当前输入的input feature map的空间大小 / 原图大小 比如1/16
sampling_ratio:划分好 aligned_height x aligned_width 个网格后,单个网格用sampling_ratio个点表示
pool_mode:1 表示 描述单个网格的点是对所有采样点去平均 0 表示取最大
aligned:双线性插值参数,是角点对齐还是中心对齐,角点对齐设置为0,中心对齐设置为1
channels:输入channels
height:输入feature map的高
width:输入feature map的宽
*/
/*
在common.cuh中有定义
#define CUDA_1D_KERNEL_LOOP(i, n) \
for (int i = blockIdx.x * blockDim.x + threadIdx.x; i < (n); \
i += blockDim.x * gridDim.x)
上述循环表示
i 初始化为 blockIdx.x * blockDim.x + threadIdx.x
步长为 blockDim.x * gridDim.x
回顾调用过程 blockDim.x 即为 单个block线程的总个数
blockIdx.x 即为grid维度上block的索引
一共启动了 blockDim.x * gridDim.x 个核函数
步长为 blockDim.x * gridDim.x 是为了满足,当nthreads > blockDim.x * gridDim.x 时,依然可以处理剩余元素
*/
CUDA_1D_KERNEL_LOOP(index, nthreads) {
// (n, c, ph, pw) is an element in the pooled output
int pw = index % pooled_width;
int ph = (index / pooled_width) % pooled_height;
int c = (index / pooled_width / pooled_height) % channels;
int n = index / pooled_width / pooled_height / channels;
const T grad_output_this_bin = grad_output[index];
const T* offset_rois = rois + n * 5;
int roi_batch_ind = offset_rois[0];
T* offset_grad_input =
grad_input + ((roi_batch_ind * channels + c) * height * width);
if (pool_mode == 0) {
T y = argmax_y[index], x = argmax_x[index];
if (y != -1.f) {
T w1, w2, w3, w4;
int x_low, x_high, y_low, y_high;
bilinear_interpolate_gradient(height, width, y, x, w1, w2, w3, w4,
x_low, x_high, y_low, y_high, index);
if (x_low >= 0 && x_high >= 0 && y_low >= 0 && y_high >= 0) {
atomicAdd(offset_grad_input + y_low * width + x_low,
grad_output_this_bin * w1);
atomicAdd(offset_grad_input + y_low * width + x_high,
grad_output_this_bin * w2);
atomicAdd(offset_grad_input + y_high * width + x_low,
grad_output_this_bin * w3);
atomicAdd(offset_grad_input + y_high * width + x_high,
grad_output_this_bin * w4);
}
}
} else if (pool_mode == 1) {
// Do not using rounding; this implementation detail is critical
T offset = aligned ? (T)0.5 : (T)0.0;
T roi_start_w = offset_rois[1] * spatial_scale - offset;
T roi_start_h = offset_rois[2] * spatial_scale - offset;
T roi_end_w = offset_rois[3] * spatial_scale - offset;
T roi_end_h = offset_rois[4] * spatial_scale - offset;
T roi_width = roi_end_w - roi_start_w;
T roi_height = roi_end_h - roi_start_h;
if (!aligned) { // for backward-compatibility only
roi_width = max(roi_width, (T)1.);
roi_height = max(roi_height, (T)1.);
}
T bin_size_h = static_cast<T>(roi_height) / static_cast<T>(pooled_height);
T bin_size_w = static_cast<T>(roi_width) / static_cast<T>(pooled_width);
// We use roi_bin_grid to sample the grid and mimic integral
int roi_bin_grid_h =
(sampling_ratio > 0)
? sampling_ratio
: static_cast<int>(ceilf(roi_height / pooled_height));
int roi_bin_grid_w =
(sampling_ratio > 0)
? sampling_ratio
: static_cast<int>(ceilf(roi_width / pooled_width));
// We do average (integral) pooling inside a bin
const T count = roi_bin_grid_h * roi_bin_grid_w; // e.g. = 4
for (int iy = 0; iy < roi_bin_grid_h; iy++) {
const T y = roi_start_h + ph * bin_size_h +
static_cast<T>(iy + .5f) * bin_size_h /
static_cast<T>(roi_bin_grid_h);
for (int ix = 0; ix < roi_bin_grid_w; ix++) {
const T x = roi_start_w + pw * bin_size_w +
static_cast<T>(ix + .5f) * bin_size_w /
static_cast<T>(roi_bin_grid_w);
T w1, w2, w3, w4;
int x_low, x_high, y_low, y_high;
bilinear_interpolate_gradient(height, width, y, x, w1, w2, w3, w4,
x_low, x_high, y_low, y_high, index);
if (x_low >= 0 && x_high >= 0 && y_low >= 0 && y_high >= 0) {
atomicAdd(offset_grad_input + y_low * width + x_low,
grad_output_this_bin * w1 / count);
atomicAdd(offset_grad_input + y_low * width + x_high,
grad_output_this_bin * w2 / count);
atomicAdd(offset_grad_input + y_high * width + x_low,
grad_output_this_bin * w3 / count);
atomicAdd(offset_grad_input + y_high * width + x_high,
grad_output_this_bin * w4 / count);
}
}
}
}
}
}
上述backward过程与cpu版本基本相同,唯一不同是梯度累加是采用atomicAdd保证原子写入。
OK,GPU版本的解读也完事了,真是通透。
五、总结
本文详细解释了RoiAlign的原理、技术细节和具体实现,希望能为一些热爱底层实现或者想”知其所以然“的朋友一点点启发,有什么问题欢迎在评论区底下留言。
六、参考链接
- https://www.cnblogs.com/wangyong/p/8523814.html
- https://blog.csdn.net/weixin_45492636/article/details/120550968
- https://github.com/open-mmlab/mmcv/blob/v2.1.0/mmcv/ops/csrc/pytorch/cpu/roi_align.cpp
- https://github.com/open-mmlab/mmcv/blob/v2.1.0/mmcv/ops/csrc/common/cuda/roi_align_cuda_kernel.cuh
- https://github.com/open-mmlab/mmcv/blob/v2.1.0/mmcv/ops/csrc/pytorch/cuda/roi_align_cuda.cu
- https://github.com/open-mmlab/mmcv/blob/v2.1.0/mmcv/ops/csrc/common/cuda/common_cuda_helper.hpp